Code
llNormal <- function(pars, y, X){
beta <- pars[1:ncol(X)]
sigma2 <- exp(pars[ncol(X)+1])
-1/2 * (sum(log(sigma2) + (y - (X%*%beta))^2 / sigma2))
}In the previous post in this series, I presented a function for calculating the log likelihood of a standard linear regression with a Normal error term. I then built a very simple dataset, ten data points linking \(x\) to \(y\), and showed how the log likelihood varied as a combination of different candidate values for the model’s intercept and slope terms (\(\beta_0\) and \(\beta_1\) respectively).
The aim of this this post is to show how the best parameter combinations tend to be estimated from a model’s log likelihood in practice, using an optimisation algorithm that iteratively tries out new parameter values, and keeps trying and trying until some kind of condition is met. This is what the last figure in the first post is trying to illustrate.
In the previous post, we ‘cheated’ a bit when using the log likelihood function, fixing the value for one of the parameters \(\sigma^2\) to the value we used when we generated the data, so we could instead look at how the log likelihood surface varied as different combinations of \(\beta_0\) and \(\beta_1\) were plugged into the formula. \(\beta_0\) and \(\beta_1\) values ranging from -5 to 5, and at steps of 0.1, were considered: 101 values of \(\beta_0\), 101 values of \(\beta_1\), and so over 10,0001 unique \(\{\beta_0, \beta_1\}\) combinations were stepped through. This approach is known as grid search, and seldom used in practice (except for illustration purposes) because the number of calculations involved can very easily get out of hand. For example, if we were to use it to explore as many distinct values of \(\sigma^2\) as we considered for \(\beta_0\) and \(\beta_1\), the total number of \(\{\beta_0, \beta_1, \sigma^2 \}\) combinations we would crawl through would be over 100,000 2 rather than over 10,000.
One feature we noticed with the likelihood surface over \(\beta_0\) and \(\beta_1\) in the previous post is that it appears to look like a hill, with a clearly defined highest point (the region of maximum likelihood) and descent in all directions from this highest point. Where likelihood surfaces have this feature of being single-peaked in this way (known as ‘unimodal’), then a class of algorithms known as ‘hill climbing algorithms’ can be applied to find the top of such peaks in a way that tends to be both quicker (fewer steps) and more precise than the grid search approach used for illustration in the previous post.
Let’s copy over the code we used in the previous post for:
llNormal <- function(pars, y, X){
beta <- pars[1:ncol(X)]
sigma2 <- exp(pars[ncol(X)+1])
-1/2 * (sum(log(sigma2) + (y - (X%*%beta))^2 / sigma2))
}And
# set a seed so runs are identical
set.seed(7)
# create a main predictor variable vector: -3 to 5 in increments of 1
x <- (-3):5
# Record the number of observations in x
N <- length(x)
# Create a response variable with variability
y <- 2.5 + 1.4 * x + rnorm(N, mean = 0, sd = 0.5)
# bind x into a two column matrix whose first column is a vector of 1s (for the intercept)
X <- cbind(rep(1, N), x)
# Clean up names
colnames(X) <- NULLTo recap, the toy dataset looks as follows:
library(tidyverse)
tibble(x=x, y=y) |>
ggplot(aes(x, y)) +
geom_point()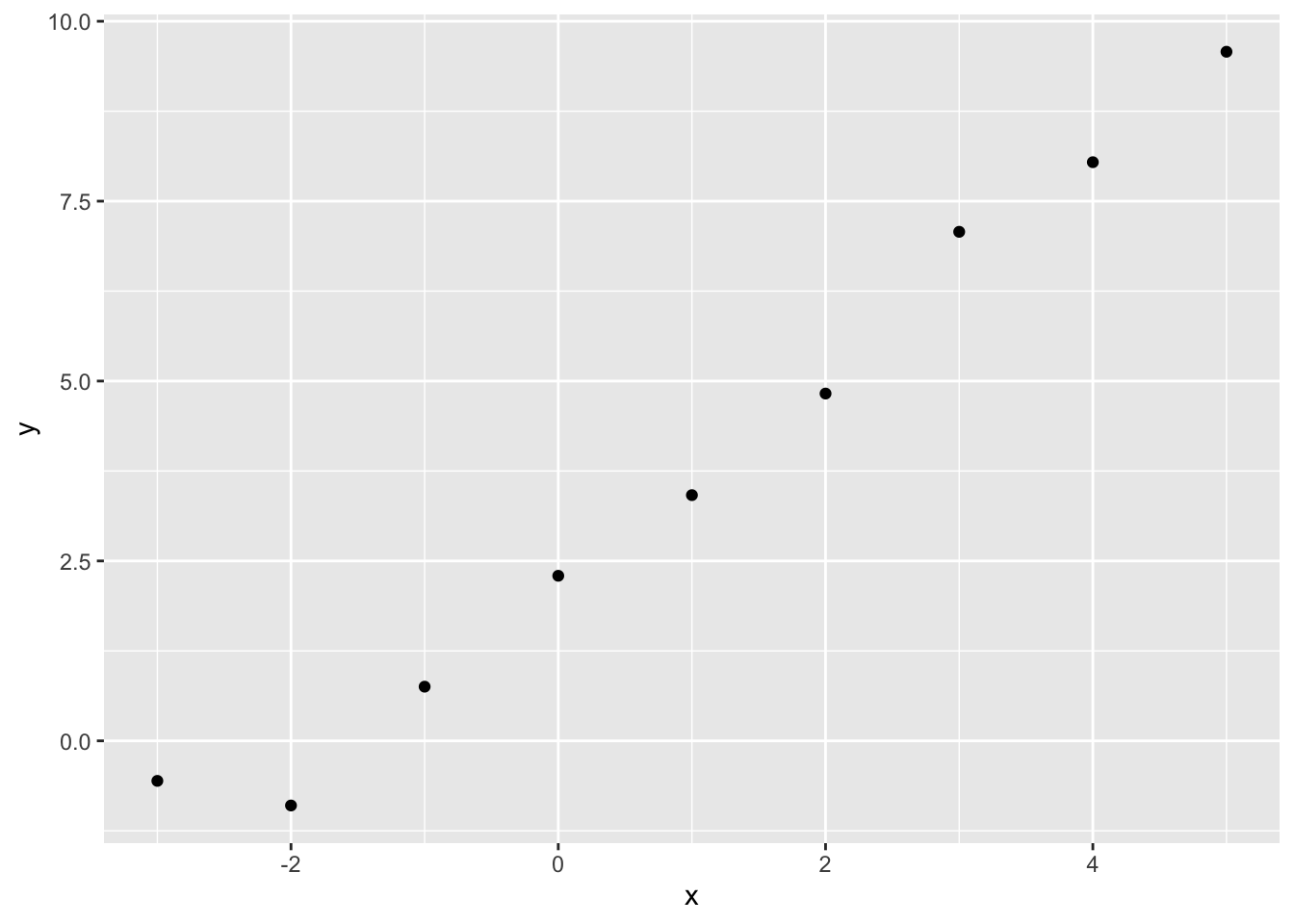
optim: our Robo-ChauffeurNote how the llNormal function takes a single argument, pars, which packages up all the specific candidate parameter values we want to try out. In our previous post, we also had a ‘feeder function’, feed_to_ll, which takes the various \(\beta\) candidate values from the grid and packages them into pars. In our previous post, we had to specify the candidate values to try to feed to llNormal packages inside pars.
But we don’t have to do this. We can instead use an algorithm to take candidate parameters, try them out, then make new candidate parameters and try them out, for us. Much as a taxi driver needs to know where to meet a passenger, but doesn’t want the passenger to tell them exactly which route to take, we just need to specify a starting set of values for the parameters to optimise. R’s standard way of doing this is with the optim function. Here’s it in action:
optim_results <- optim(
# par contains our initial guesses for the three parameters to estimate
par = c(0, 0, 0),
# by default, most optim algorithms prefer to search for a minima (lowest point) rather than maxima
# (highest point). So, I'm making a function to call which simply inverts the log likelihood by multiplying
# what it returns by -1
fn = function(par, y, X) {-llNormal(par, y, X)},
# in addition to the par vector, our function also needs the observed output (y)
# and the observed predictors (X). These have to be specified as additional arguments.
y = y, X = X
)
optim_results$par
[1] 2.460571 1.375421 -1.336209
$value
[1] -1.51397
$counts
function gradient
216 NA
$convergence
[1] 0
$message
NULLThe optim function returns a fairly complex output structure, with the following components:
par: the values for the parameters (in our case \(\{\beta_0, \beta_1, \eta \}\)) which the optimisation algorithm ended up with.
value: the value returned by the function fn when the optim routine was stopped.
counts: the number of times the function fn was repeatedly called by optim before optim decided it had had enough
convergence: whether the algorithm used by optim completed successfully (i.e. reached what it considers a good set of parameter estimates in par), or not.
In this case, convergence is 0, which (perhaps counterintuitively) indicates a successful completion. counts indicates that optim called the log likelihood function 216 times before stopping, and par indicates values of \(\{\beta_0 = 2.46, \beta_1 = 1.38, \eta = -1.34\}\) were arrived at. As \(\sigma^2 = e^\eta\), this means \(\theta = \{\beta_0 = 2.46, \beta_1 = 1.38, \sigma^2 = 0.26 \}\). As a reminder, the ‘true’ values are \(\{\beta_0 = 2.50, \beta_1 = 1.40, \sigma^2 = 0.25\}\).
So, the optim algorithm has arrived at pretty much the correct answers for all three parameters, in 216 calls to the log likelihood function, whereas for the grid search approach in the last post we made over 10,000 calls to the log likelihood function for just two of the three parameters.
Let’s see if we can get more information on exactly what kind of path optim took to get to this set of parameter estimates. We should be able to do this by specifying a value in the trace component in the control argument slot…
For comparison let’s see what lm and glm produce.
First lm:
toy_df <- tibble(
x = x,
y = y
)
mod_lm <- lm(y ~ x, data = toy_df)
summary(mod_lm)
Call:
lm(formula = y ~ x, data = toy_df)
Residuals:
Min 1Q Median 3Q Max
-0.6082 -0.3852 -0.1668 0.2385 1.1092
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 2.46067 0.20778 11.84 6.95e-06 ***
x 1.37542 0.07504 18.33 3.56e-07 ***
---
Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
Residual standard error: 0.5813 on 7 degrees of freedom
Multiple R-squared: 0.9796, Adjusted R-squared: 0.9767
F-statistic: 336 on 1 and 7 DF, p-value: 3.564e-07\(\{\beta_0 = 2.46, \beta_1 = 1.38\}\), i.e. the same to 2 decimal places.
And now with glm:
mod_glm <- glm(y ~ x, data = toy_df, family = gaussian(link = "identity"))
summary(mod_glm)
Call:
glm(formula = y ~ x, family = gaussian(link = "identity"), data = toy_df)
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept) 2.46067 0.20778 11.84 6.95e-06 ***
x 1.37542 0.07504 18.33 3.56e-07 ***
---
Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1
(Dispersion parameter for gaussian family taken to be 0.3378601)
Null deviance: 115.873 on 8 degrees of freedom
Residual deviance: 2.365 on 7 degrees of freedom
AIC: 19.513
Number of Fisher Scoring iterations: 2Once again, \(\{\beta_0 = 2.46, \beta_1 = 1.38\}\)
In the above, we’ve successfully used optim, our Robo-Chauffeur, to arrive very quickly at some good estimates for our parameters of interest, \(\beta_0\) and \(\beta_1\), which are in effect identical to those produced by the lm and glm functions.
This isn’t a coincidence. What we’ve done the hard way is what the glm function (in particular) largely does ‘under the hood’.
In the next part of this series, we’ll see how other outputs available from optim can be used to estimate uncertainty in the parameters of interest, how this information can be used to produce the kinds of estimates of standard errors around coefficients which are summarised in glm and lm summary() functions, and which many (ab)users of statistical models obsess about when star-gazing, and how information about uncertainty in parameter estimates allows for more honest model-based predictions.3
\(101^2 = 10201\)↩︎
\(101^3 = 1030301\)↩︎
Note from Claude: Optimization algorithms like those in R’s optim() are fundamental to modern machine learning. The “Robo-Chauffeur” metaphor applies equally to gradient descent (the workhorse of deep learning), Adam, RMSprop, and other optimizers. Andrew Ng’s Machine Learning Specialization on Coursera covers gradient descent extensively, while Sebastian Ruder’s “An overview of gradient descent optimization algorithms” (free online) provides a comprehensive survey. In Python, scipy.optimize offers methods like minimize() and minimize_scalar(), while ML frameworks provide high-level APIs: PyTorch’s torch.optim module includes optimizers like SGD and Adam, and TensorFlow’s tf.keras.optimizers provides similar functionality. The key insight—algorithms iteratively adjust parameters to minimize loss—remains constant from simple GLMs to complex neural networks.↩︎